Team Details
DHBW Engineering Stuttgart e.V.
| University | Duale Hochschule Baden-Württemberg Stuttgart
DE Stuttgart DHBW short 138 |
 |
|---|---|---|
| Location | Stuttgart, Germany | |
| Homepage | https://dhbw-engineering.de | |
| Social Media | ||
| CV Team | DHBW Engineering Stuttgart | |
| DV Team | DHBW Engineering Stuttgart e.V. | |
| Short Link | tid.fsg.one/434 | |
| TIS Status |
     |
|
| Event Details | car 77 - active | |
Team Description
DHBW Engineering Stuttgart - a team of nearly 130 students of the Cooperative State University of Baden Wuerttemberg. Founded in 2008, we have been participating in the Formula Student Combustion until we decided to switch to Formula Student Electric in 2011. What distinguishes us from most of the other teams is that all of our team members spend one half of their days at university and the other half in their training companies. Because of this and all other challenges that arise from Formula Student is why we depend on a perfectly harmonizing team to build our A-Team-E-Car.
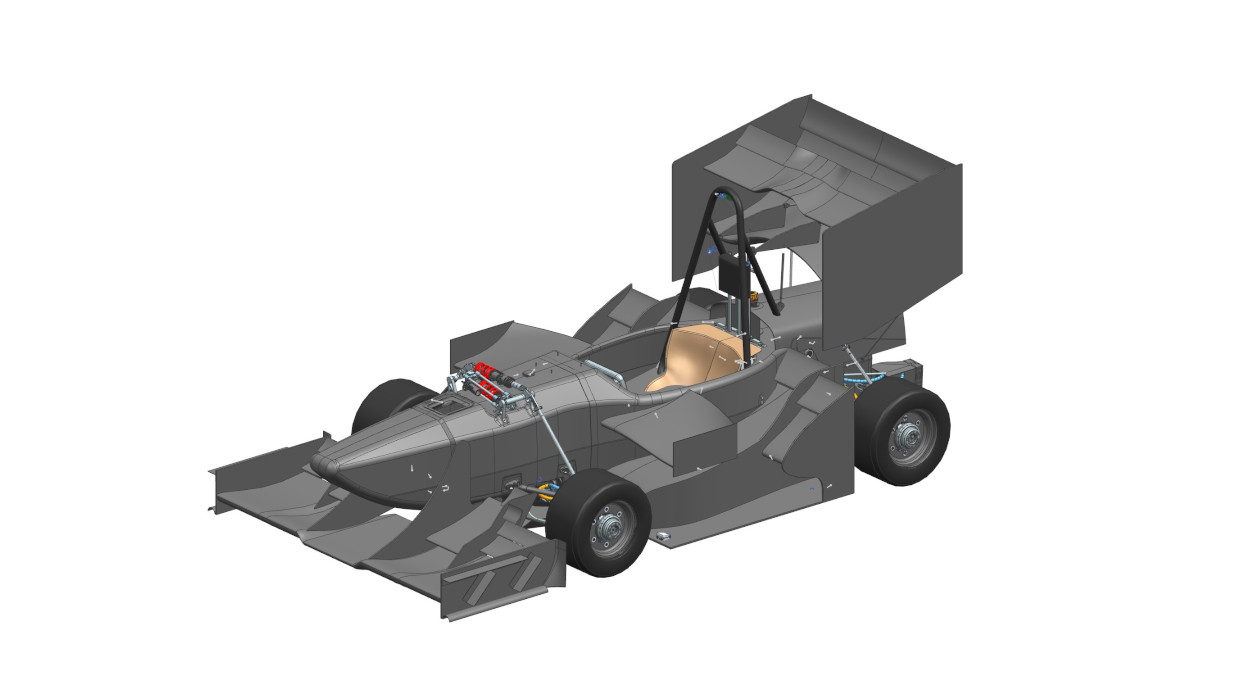
2026

Info
DHBW Engineering is a team of 120 students from Stuttgart. The eSleek26 marks our tenth all-wheel drive electric vehicle. This season, our goals are an overall EV Cup podium and a P5 finish in Driverless. Therefore we executed a complete top-down vehicle redesign aimed at drastic lap time reduction. This includes a redesigned monocoque, a new aero package, self-developed inverter and motors, accumulator, spring-damper-system and so much more. Together with our A-Team, we build our E-Car.
Engineering Design Priorities:
Increase Downforce
Reduce Vehicle Mass
Shift Weight Distribution
Shift Aero Balance
Integrate DV Components
Increase Power Density
Car Specifications
General
| Frame Construction | single piece CFRP monocoque with aluminimum honeycomb |
|---|---|
| Material | Plascore aluminum honeycomb with spreadtow & UD-fibres |
| Overall Length (mm) | 2987 |
| Overall Width (mm) | 1543 |
| Overall Height (mm) | 1131 |
| Wheelbase (mm) | 1530 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 118 |
| Weight Rear (kg) | 127 |
| Suspension | Double A-Arm, pushrod |
| Tyres | Hoosier 16.0x7.5 R10 LC0 |
| Wheels | 16.0x7.5x10 |
| Drive Type | 1.5-stage coupled planetary |
| Differential | none, torque vectoring |
| Cooling | two liquid cooling loops: tractive system & battery |
| Brake System | Dual-circuit, balance bar |
| Electronics | 46V nominal system voltage, multifunctional steering wheel, self-designed live-telemetry |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | wheelhub mounted |
| Max Motor Power | 41 kW x4 |
| Motor Type | self-developed IPMSM |
| Max Motor RPM | 25000 |
| Motor Controller | self-developed |
| Max System Voltage (V) | 600 |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 7.2 kWh |
| Transmission Ratio Primary | 11.7:1 |
| Transmission Ratio Secondary | n/a |
Driverless System
| Processing Units | NVIDIA Jetson Thor Dev. Kit, 128 GB RAM, Arm® Neoverse®-V3AE 64-Bit-CP |
|---|---|
| Processing Units FLOPS | 80 |
| Processing Units Power (W) | 130 |
| Cameras | Daheng Imaging ME2P-900-43U3C (4200x2160) |
| Radar Sensors | none |
| LiDAR Sensors | Hesai ATX, 116 channels, 120°x20° FOV |
| Other Sensors | OMS Race, xSens IMUs, Antennas, Tyre Temps, Rideheights and many more |
| DV System Highlights | LiDAR-Camera sensor fusion, integration of computing unit for both EV and DV |
Past Events

2025
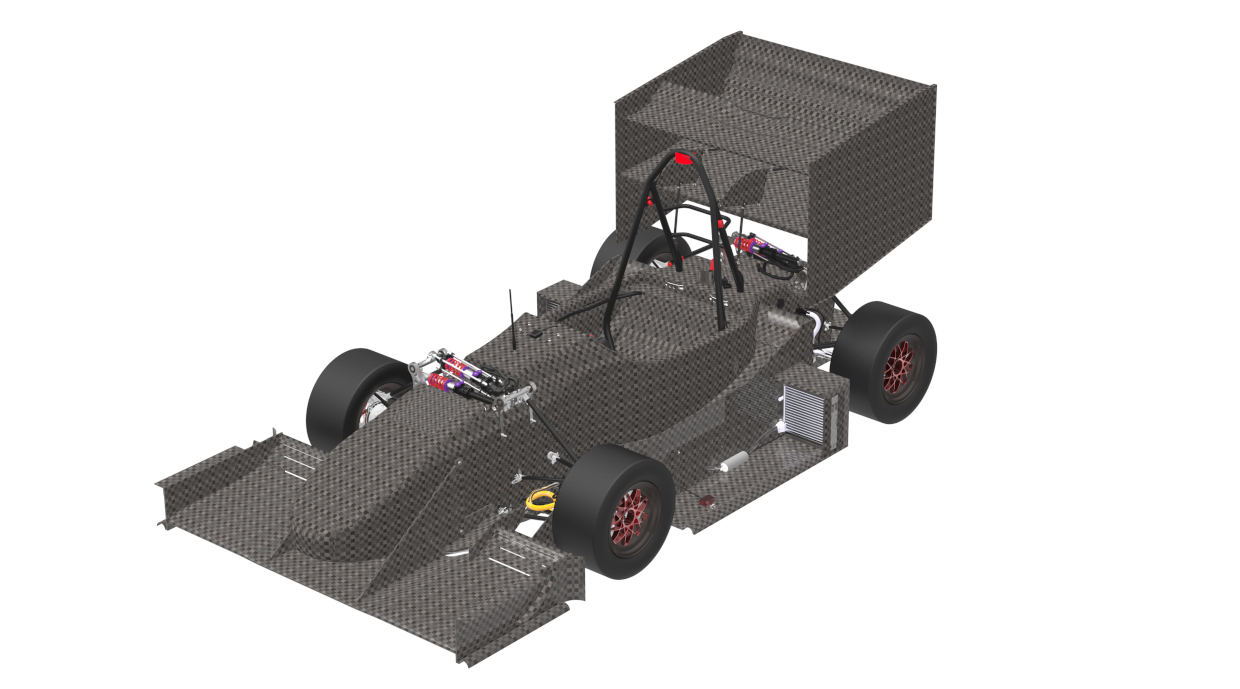
Info
118x
DHBW Engineering Stuttgart e.V. has been successfully competing in FormulaStudent since 2008. The team switched to electric vehicles in 2012 and built its first autonomous car in 2019. With 120 members, all corporate students balancing workand study without the option of taking a semester off. They are developing the car alongside full-time commitments. Supported by alumni and sponsors, DHBWEngineering is a success story driven by passion.
Engineering Design Priorities:
Engineering
Stuttgart
Passion
Car Specifications
General
| Frame Construction | unibody monocoque with integrated front hoop |
|---|---|
| Material | HM/HT carbon fibers, aluminium honeycomb |
| Overall Length (mm) | 3018 |
| Overall Width (mm) | 1660 |
| Overall Height (mm) | 1187 |
| Wheelbase (mm) | 1630 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 129 |
| Weight Rear (kg) | 129 |
| Suspension | Double unequal length A-arm. Push rod actuated heave and roll decoupled spring and damper |
| Tyres | Hoosier 16.0x7.5 R10 LC0 |
| Wheels | Hoosier 16.0x7.5 R10 LC0 |
| Drive Type | Planetary gear |
| Differential | n/a |
| Cooling | Single circuit for power electronics and motors, Watercooled Battery on another circuit |
| Brake System | 4-Disk system, self developed rotors with 190mm outer diameter, adjustable brake balance |
| Electronics | Self-designed system electronics, telemetry system |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | Wheel Hub Motors |
| Max Motor Power | 41kW per Motor |
| Motor Type | permanent excitated synchronous maschine |
| Max Motor RPM | 25000 |
| Motor Controller | 4x inhouse developed inverters |
| Max System Voltage (V) | 600 |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 6.82kWh |
| Transmission Ratio Primary | 11.69 |
| Transmission Ratio Secondary | n/a |
Driverless System
| Processing Units | Speedgoat Baseline and i9 10900KF RTX 3050 |
|---|---|
| Processing Units FLOPS | 32336 |
| Processing Units Power (W) | 360 |
| Cameras | Stereolabs ZED 2i, FOV: 70°x110° |
| Radar Sensors | n/a |
| LiDAR Sensors | Hesai AT128, 200m range, 120° |
| Other Sensors | Novatel PwrPak7D, 2x XSENS IMU, Sensoric Solutions OMS Race |
| DV System Highlights | Redundant Perception concept for stereo camera and lidar. ML Workflow for AI models. Decouplement of native camera software from camera hardware and replacement with open source libraries. EKF-Localisation. Performant Accel and Skidpad pathfinding. Curvature based Motion Controller. Inhouse developed Simulation (SiL and HiL) |

2024
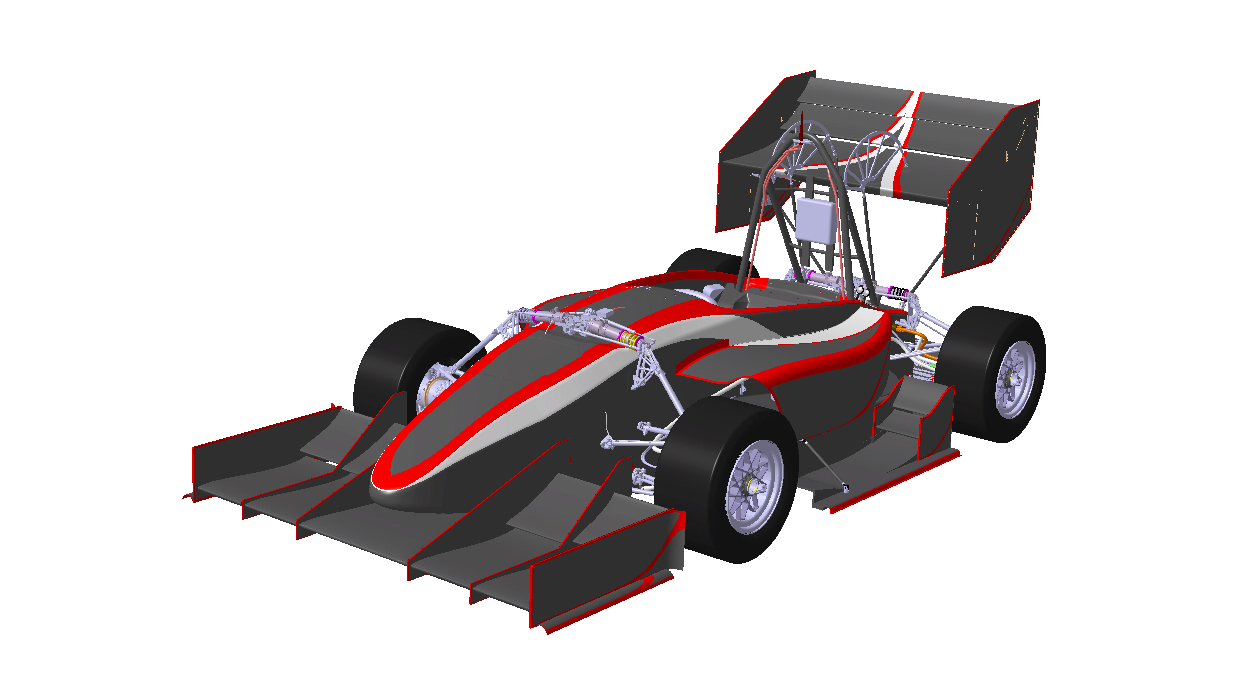
Info
75x
Our team, the DHBW Engineering Stuttgart e.V., consists of 130 motorsport enthusiastic students of the DHBW Stuttgart. Founded in 2008, we are already competing with our 15th Sleek. Every season we try to build on previous achievements, push the limits of our performance and strive to improve the lap time. Due to our unique way of studying and working, we rely heavily on a great team spirit, which leads us to our motto: It takes an A-Team to build an e-car.
Engineering Design Priorities:
Minimise Weight
Battery
Vehicle Balance
Aerodynamics
DV Software Stack
A-Team E-Car
Car Specifications
General
| Frame Construction | Unibody monocoque with integrated front hoop |
|---|---|
| Material | HM / HT Carbon fibers, Aluminium honeycomb |
| Overall Length (mm) | 3026 |
| Overall Width (mm) | 1428 |
| Overall Height (mm) | 1195 |
| Wheelbase (mm) | 1630 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 121 |
| Weight Rear (kg) | 129 |
| Suspension | Double unequal length A-arm. Pushrod actuated heave and roll decoupled spring and damper |
| Tyres | 16x7.5 R10, Hoosier LC0 |
| Wheels | 10.0x7, 44.14mm offset, composite rim |
| Drive Type | Planetary gear |
| Differential | n/a |
| Cooling | Single circuit for power electronics and motors |
| Brake System | 4-Disk system, self developed rotors with 190mm outer diameter, adjustable brake balance |
| Electronics | Self-designed system electronics, telemetry system |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | All wheels |
| Max Motor Power | 36kW |
| Motor Type | AMK DT5 |
| Max Motor RPM | 20000 |
| Motor Controller | PrePulse |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 6,82kWh |
| Transmission Ratio Primary | 11,69 |
| Transmission Ratio Secondary | n/a |
Driverless System
| Processing Units | i9 10900KF RTX 3050 |
|---|---|
| Processing Units FLOPS | 32336 |
| Processing Units Power (W) | 320 |
| Cameras | Stereolabs ZED 2i, FOV: 70°x110° |
| Radar Sensors | n/a |
| LiDAR Sensors | Ouster OS1 64 Layer, Range: 90m, FOV 45°x360° |
| Other Sensors | Novatel PwrPak7D, 2x XSENS IMU |
| DV System Highlights | Redundant Perception concept for stereo camera and lidar. ML Workflow for AI models. Decouplement of native camera software from camera hardware and replacement with open source libraries. EKF-Localisation. Performant Accel and Skidpad pathfinding. Curvature based Motion Controller. Inhouse developed Simulation (SiL and HiL) |

2023
Info
98x
Our team, the DHBW Engineering Stuttgart e.V., consists of 110 motorsport enthusiast students from the DHBW Stuttgart. Founded in 2008, we are ready to compete in our 14th season. Each season we try to build on our previous successes, improve our performance and strive to improve our lap times. Due to our unique way of studying and working, we rely heavily on a great team spirit, which leads us to our motto: It takes an A-Team to build an e-car.
Engineering Design Priorities:
Minimise weight
Motor Controller
Battery
Aerodynamic
Vehicle Dynamic Control
A-team E-car
Car Specifications
General
| Frame Construction | Unibody monocoque with integrated front hoop |
|---|---|
| Material | HM / HT Carbon fibers, Aluminium honeycomb |
| Overall Length (mm) | 3010 |
| Overall Width (mm) | 1595 |
| Overall Height (mm) | 1195 |
| Wheelbase (mm) | 1630 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 121 |
| Weight Rear (kg) | 131 |
| Suspension | Double unequal length A-arm. Pushrod actuated heave and roll decoupled spring and damper |
| Tyres | 16x7.5 R10, Hoosier LC0 |
| Wheels | 10.0x7, 44.14mm offset, composite rim |
| Drive Type | Planetary gear |
| Differential | n/a |
| Cooling | Single circuit for power electronics and motors |
| Brake System | 4-Disk system, self developed rotors with 190mm outer diameter, adjustable brake balance |
| Electronics | Self-designed system electronics, telemetry system |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | All wheels |
| Max Motor Power | 36kW |
| Motor Type | AMK DT5 |
| Max Motor RPM | 20000 |
| Motor Controller | PrePulse V6 |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 6.82kWh |
| Transmission Ratio Primary | 11.69 |
| Transmission Ratio Secondary | n/a |
Driverless System
| Processing Units | i9 10900KF RTX 3050 |
|---|---|
| Processing Units FLOPS | 32336 |
| Processing Units Power (W) | 320 |
| Cameras | Stereolabs ZED 2i, FOV: 70°x110° |
| Radar Sensors | n/a |
| LiDAR Sensors | Ouster OS1 64 Layer, Range: 90m, FOV 45°x360° |
| Other Sensors | Novatel PwrPak7D, 2x XSENS IMU |
| DV System Highlights | Redundant Perception concept for stereo camera and lidar. ML Workflow for AI models. Decouplement of native camera software from camera hardware and replacement with open source libraries. EKF-Localisation. Performant Accel and Skidpad pathfinding. Curvature based Motion Controller. Inhouse developed Simulation (SiL and HiL) |

2022
Info
156x
Our team, the DHBW Engineering Stuttgart, consists of 110 motorsport enthusiastic students of the DHBW Stuttgart. Founded in 2008, we are already competing with our 13th Sleek. Every season we try to build on previous achievements, push the limits of our performance and strive to improve the lap time. Because of our special form of study, we are highly dependent on a great team spirit. This leads us to our motto: You need an A-Team to build an E-Car.
Engineering Design Priorities:
driverless integration
aero balance
spring damper system
aero validation
reliability
A-team E-car
Car Specifications
General
| Frame Construction | Unibody monocoque with integrated front hoop |
|---|---|
| Material | HM / HT Carbon fibers, Aluminium honeycomb |
| Overall Length (mm) | 2912 |
| Overall Width (mm) | 1523 |
| Overall Height (mm) | 1222 |
| Wheelbase (mm) | 1530 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 113 |
| Weight Rear (kg) | 139 |
| Suspension | Double unequal length A-Arm. Push rod actuated heave and roll decoupled spring and damper |
| Tyres | 16x7.5 R10, Hoosier LC0 |
| Wheels | 10.0x7, 44.14mm offset, composite rim |
| Drive Type | Planetary gear |
| Differential | n/a |
| Cooling | Single circuit for power electronics and motors |
| Brake System | 4-Disk system, self developed rotors with 190mm outer diameter, adjustable brake balance |
| Electronics | Self-designed system electronics, telemetry system |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | All wheels |
| Max Motor Power | 36kW |
| Motor Type | AMK DT5 |
| Max Motor RPM | 20000 |
| Motor Controller | AMK KW 26 |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 6.98kWh |
| Transmission Ratio Primary | 11.69 |
| Transmission Ratio Secondary | n/a |
Driverless System
| Processing Units | Intel Core i7-10750H, RTX 2080 mobile |
|---|---|
| Processing Units FLOPS | 9829.5 |
| Processing Units Power (W) | 330.00 |
| Cameras | Stereolabs ZED 2i |
| Radar Sensors | n/a |
| LiDAR Sensors | Ouster OS1 64 Layer |
| Other Sensors | Novatel PwrPak7D, 2x XSENS IMU |
| DV System Highlights | First time use of stereo camera, self developed fusion of camera and LiDAR data, laptime optimization algorithm, curvature based Motion Controller |
2021
Info
112x
DHBW Engineering Stuttgart - a team of nearly 100 students of the Cooperative State University of Baden Wuerttemberg. Starting in Formula Student Combustion and switching to Formula Student Electric in 2011, we’ve been building high performance cars for 13 years. For building an even better race car this year, our main goal of the season is to implement our self developed powermodule "PrePulse". To accomplish this challenge we depend on a perfectly harmonized and organised team.
Engineering Design Priorities:
aerodynamics
chassis
digital development
kinematics
lightweight
A-team E-car
Car Specifications
General
| Frame Construction | unibody monocoque with integrated front hoop |
|---|---|
| Material | HM/HT carbon fibers / aluminium honeycomb |
| Overall Length (mm) | 2844 |
| Overall Width (mm) | 1527 |
| Overall Height (mm) | 1186 |
| Wheelbase (mm) | 1530 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 111 |
| Weight Rear (kg) | 130 |
| Suspension | Double unequal length A-Arm, Heave and roll decoupled suspension |
| Tyres | 16.0x7,5-10 Hoosier LC0 |
| Wheels | 7.2x10, 2 pc CFRP Rim |
| Drive Type | planetary gear |
| Differential | none |
| Cooling | single circuit for power electronics and motors |
| Brake System | 4-Disk system, self developed rotors with 190mm outer diameter, adjustable brake balance, |
| Electronics | self-designed system electronics, telemetry system |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | all wheels |
| Max Motor Power | 36 |
| Motor Type | AMK DT5 |
| Max Motor RPM | 20000 |
| Motor Controller | AMK |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 6,98kWh |
| Transmission Ratio Primary | 11,69 |
| Transmission Ratio Secondary | none |
2018
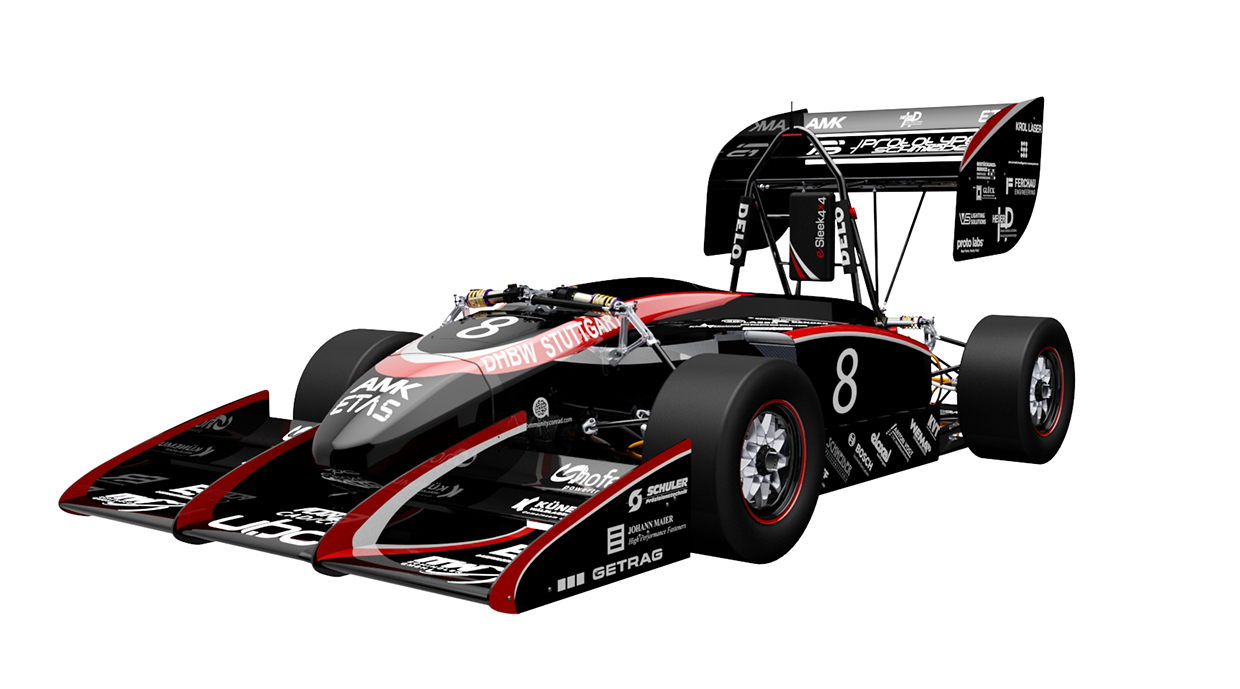
Info
67x
DHBW Engineering Stuttgart - a team of nearly 100 students of the Cooperative State University of Baden Wuerttemberg. Founded in 2008, we have been participating in the Formula Student Combustion until we decided to switch to Formula Student Electric in 2011. Because of our special form of study and all other challenges that arise from Formula is why we depend on a perfectly harmonizing team to build our A-Team-E-Car.
Engineering Design Priorities:
maximise dynamic tireload
even tire load
Minimise weight
Data Processing
suspension design
aerodynamic simulation
Car Specifications
General
| Frame Construction | unibody monocoque with integrated front hoop |
|---|---|
| Material | hM/ HT Carbon fibers/ Aluminium honeycomb |
| Overall Length (mm) | 2934 |
| Overall Width (mm) | 1442 |
| Overall Height (mm) | 1193 |
| Wheelbase (mm) | 1580 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 120 |
| Weight Rear (kg) | 136 |
| Suspension | double A-Arms, Push rod actuated spring-damper-system with decoupled drive modes |
| Tyres | 18.0x7.5 R10, Hoosier R25B /18.0x7.5 R10, Hoosier R25B |
| Wheels | 7x10,38mm offs,2-pcs. Al star,CFK bed / 7x10,38mm offs,2-pcs. Al star,CFK bed |
| Differential | non |
| Cooling | single circuit for power electronic and motors; radiators placed on the side |
| Brake System | uter: 184.4mm, Inner:123.6mm, Floating, hubmounted, steel; 15.9 mm piston diameter |
| Electronics | Multifunctional Steering Wheel, Telemetry System |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | Wheel hub motors |
| Max Motor Power | 38 kW |
| Motor Type | AMK DT5 |
| Max Motor RPM | 20000 ( Front and Rear) |
| Motor Controller | AMK KW26 |
| Max System Voltage (V) | 588V |
| Electrode Materials | LiCoO2 |
| Accumulator Capacity | 6,78 kWh |
| Transmission Ratio Primary | 1:12.69 |
| Transmission Ratio Secondary | 1:12.69 |
2017
Info
48x
Almost one hundred team members, organized in eight sub teams, joined up in the DHBW Engineering Stuttgart e.V. to build the new eSleek17, the sixth electric vehicle in the history of DHBW Engineering Stuttgart e.V. The creation of a stronger link between the different parts of the vehicle setup is one of this season's main goals in order to retrieve the full performance capability of the eSleek17.
Engineering Design Priorities:
reliability
simulation
lightweight
downforce
becauseracecar
Car Specifications
General
| Frame Construction | unibody monocoque with integrated front hoop |
|---|---|
| Material | HM/ HT Carbon fibres/ Aluminium honeycomb |
| Overall Length (mm) | 2908 |
| Overall Width (mm) | 1442 |
| Overall Height (mm) | 1128 |
| Wheelbase (mm) | 1550 |
| Track Front (mm) | 1220 |
| Track Rear (mm) | 1220 |
| Weight Front (kg) | 133 |
| Weight Rear (kg) | 126 |
| Suspension | Double A-Arm,Pushrod actuated spring-damper-system,horizontal spring &damper,independent w |
| Tyres | dry: Hoosier 18.0x7.5 R10 ... wet: Continental 205/470 R13 |
| Wheels | 7x10,38mm offs,2-pcs. Al star,CFK bed |
| Drive Type | reduced planetary gearbox |
| Differential | none |
| Cooling | Watercooling, Twin side pod mounted radiators |
| Brake System | 4-Disk system, floating rotors with 184.4mm outer diameter, adjustable brake balance |
| Electronics | Multifunctional Steering Wheel, selfdesigned 4CAN Datalogger,Live Telemetry, smart sensors |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | FR, FL, RR, RL |
| Max Motor Power | 40kW, 40kW, 40kW, 40kW |
| Motor Type | AMK, DT5 |
| Max Motor RPM | 20000 for all |
| Motor Controller | AMK KW 26 |
| Max System Voltage (V) | 604V |
| Electrode Materials | LiPo - graphite |
| Accumulator Capacity | 6.67 kWh |
| Transmission Ratio Primary | 12.69 |
| Transmission Ratio Secondary | - |
2016
Info
12x
The eSleek4x4 has been designed under the general requirements of controllability for the driver, reliability and agility in order to compete well in all disciplines at FSE. A major innovation has been made by the implementation of a 4-wheel drive, wherefore modifications at the monocoque, the kinematic and the gearbox have been necessary. Where possible, working concepts of the last years vehicle have been integrated in the eSleek4x4 in order to ensure a high reliability of the car.
Engineering Design Priorities:
4-wheel-drive
Monocoque
Kinematic
Gearbox
Low inertia around z-axis
Aerodynamik
Car Specifications
General
| Frame Construction | Integral CFRP Monocoque |
|---|---|
| Material | HM and HT Carbon Fibres, Aluminium honeycomb |
| Overall Length (mm) | 2918 |
| Overall Width (mm) | 1372 |
| Overall Height (mm) | 1149 |
| Wheelbase (mm) | 1550 |
| Track Front (mm) | 1150 |
| Track Rear (mm) | 1150 |
| Weight Front (kg) | 138 |
| Weight Rear (kg) | 129 |
| Suspension | Double unequal length A-Arm with Push rod actuated spring and damper above monocoque |
| Tyres | Hoosier 18.0x7.5-10 |
| Wheels | 7.25x10, 37.5mm offset, 2pc Al-CFK / 3pc |
| Drive Type | Edrive, 4WD, one motor per wheel |
| Differential | electrical |
| Cooling | twin sice pod mounted radiators from Rigi CH-6010-Kriens |
| Brake System | 4-Disk system, self developed rotors with loating, Aluminium Composite, 190mm outer dia, 100mm inner |
| Electronics | Centralized E/E architecture with mature analysis functions for vehicle control and battery manageme |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | FR, FL, RR, RL |
| Max Motor Power | 32kW |
| Motor Type | AMK DT5 14-10 |
| Max Motor RPM | 15000 |
| Motor Controller | AMK KW 26 |
| Max System Voltage (V) | 600 |
| Electrode Materials | 144s2p LiPo battery |
| Accumulator Capacity | 6,7 kWh |
| Transmission Ratio Primary | 1:12,7 |
| Transmission Ratio Secondary | n/a |

2015
Info
28x
The eSleek15 was designed under a few general decisions. At first was designed to be reliable and well-balenced in order to compete well in all disciplines at FSE. Furthermore the target weight was reduced to 171kg. Focusing an mechanical innovations the elctric systems should only undergo minor changes. All in all the main focus of the design process was the improvement of the vehicles dynamics. Therefore a completely new kinematic was combined with improved software and an aerodynamic package.
Engineering Design Priorities:
CFRP full monocoque
Aerodynamic
vehicle dynamics
weightreduction
baseplate
sidebox accumulator
Car Specifications
General
| Frame Construction | CFRP Monocoque structure |
|---|---|
| Material | CFRP with Aluminium honeycomb sandwich panel and rohacell sandwich panel |
| Overall Length (mm) | 2840 |
| Overall Width (mm) | 1366 |
| Overall Height (mm) | 1187 |
| Wheelbase (mm) | 1550 |
| Track Front (mm) | 1150 |
| Track Rear (mm) | 1100 |
| Weight Front (kg) | 122 |
| Weight Rear (kg) | 117 |
| Suspension | Double unequal length A-Arm. Push rod actuated horizontally oriented spring and damper (coil-over). |
| Tyres | 18x6.0-10 R25B |
| Wheels | 18x6.0-10 R25B |
| Drive Type | Edrive, 2WD, one motor per wheel |
| Differential | electrical |
| Cooling | Two side mounted 1400cc (1x 600, 1x800) radiators |
| Brake System | 4-Disk system, self developed rotors, balance bar, ISR caliper (FA), AP Racing caliper (RA) |
| Electronics | Self developed, platform independend Live-Telemetry with data analysis tool, Self-diagnosis on ECU |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear Right, Rear Left |
| Max Motor Power | 40kW |
| Motor Type | AMK DT5-26-10-POW |
| Max Motor RPM | 16000 |
| Motor Controller | AMK KW26-S5-FSE-4Q |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiPo |
| Accumulator Capacity | 6,6kWh |
| Transmission Ratio Primary | 1:3,07 |
| Transmission Ratio Secondary | 1:2,87 |

2014
Info
42x
Our latest car eSleek14 is designed under following general decision. At first we want a reliable car, well-balanced for all events on FSE. Then we want to reduce the weight down to 180Kg. The electrical system should not changed in general compared to eSleek13 to concentrate on mechanical innovation. And at last the center of gravity should be lower, to optimize the dynamics of the car.This is achieved with a CFRP full monocoque and 10" wheels as the most obvious changes.
Engineering Design Priorities:
CFRP full monocoque
10" wheels
180Kg
sidebox accumulator
self-developed AMS
self-developed datalogger
Car Specifications
General
| Frame Construction | CFRP Monocoque with foam core |
|---|---|
| Material | preimpragnated high tensile fabrics 200 g/sqm; spread tow fabrics; Rohacell foam |
| Overall Length (mm) | 2562 |
| Overall Width (mm) | 1350 |
| Overall Height (mm) | 1031 |
| Wheelbase (mm) | 1550 |
| Track Front (mm) | 1160 |
| Track Rear (mm) | 1110 |
| Weight Front (kg) | 112 |
| Weight Rear (kg) | 134 |
| Suspension | Double unequal length A-Arm. Push rod actuated horizontally oriented spring and damper |
| Tyres | 10x7,5 |
| Wheels | 2 pc Al Rim |
| Drive Type | two stage spur gear |
| Differential | Torque vectoring via software |
| Cooling | 2 side mounted radiator for two separate water cooling systems and one electric fan each accumulator |
| Brake System | 4 self-developed disks with 6 calipers, adjustable brake balance |
| Electronics | self-developed datalogger with live telemetry, LCD dashboard and communication via two CAN busses |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear right, rear left |
| Max Motor Power | 2x42KW |
| Motor Type | AMK DT5-26-10-POW |
| Max Motor RPM | 16.000 |
| Motor Controller | AMK KW 26 S |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiPo |
| Accumulator Capacity | 6,6kWh |
| Transmission Ratio Primary | 7,85 |
| Transmission Ratio Secondary | N/A |

2013
Info
52x
200 kg - 600V – 1000 Nm these figures should give you an idea of the eSleek13, the fifth and latest development of DHBW Engineering Stuttgart. Throughout the design process our main goals were to create a high performance, lightweight concept to perfectly match the demands of the formula student competition. Equipped with two highly efficient motors our interpretation of a formula style racecar has a total system power of 66 kW (90 hp) resulting in an impressive power to weight ratio of 2.2 kg/hp. The Chassis, which now consists of a hybrid structure made of a carbon fiber monocoque and a tubular steel frame is undoubtedly the most significant innovation to this season’s eSleek. This gave us the opportunity to develop great know how in the field of carbon fiber reinforced plastic and offers great potential for eSleek14. We would like to thank FSG and our sponsors for making it possible to participate in this great event and wish all teams the best of luck for the competition!
Car Specifications
General
| Frame Construction | Hybrid frame with CFRP monocoque in front and tubular steel space frame in the rear |
|---|---|
| Material | CFRP, aluminium honeycomb / 25CrMo4 steel space frame |
| Overall Length (mm) | 2825 |
| Overall Width (mm) | 1400 |
| Overall Height (mm) | 1150 |
| Wheelbase (mm) | 1550 |
| Track Front (mm) | 1150 |
| Track Rear (mm) | 1100 |
| Weight Front (kg) | 134 |
| Weight Rear (kg) | 134 |
| Suspension | Double unequal length A-Arm. Pull rod. actuated spring / damper. Adj. Roll bar. |
| Tyres | 20.5x7.0 (R13), R25B, Hoosier / 20.5x7.5 (R13), R25B, Hoosier |
| Wheels | 7x13, Mg Rim, 22mm neg. offset / 7x13, Mg Rim, 22mm neg. offset |
| Drive Type | two stage gearbox |
| Differential | fully adjustable electronic software differential |
| Cooling | central mounted radiator without fan |
| Brake System | 4-Disk system, self developed rotors, front 230mm, rear 205mm, adjustable brake balance |
| Electronics | Torque Vectoring, Traction Control, Model-Driven SW, Live-Telemetry System |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear Right, Rear Left |
| Max Motor Power | 33 kW |
| Motor Type | AMK DT5-20 / perm.-magnet synchronous motors |
| Max Motor RPM | RR, RL: 16.000 |
| Motor Controller | AMK KW26 S |
| Max System Voltage (V) | 600V |
| Electrode Materials | LiPo |
| Accumulator Capacity | 5,3kWh |
| Transmission Ratio Primary | 1:13,30 |

2012
Info
The DHBW Engineering Formula Student Team from the Cooperate State University Baden-Württemberg was founded in 2008 and already passed three successful seasons with a combustion car. The overall victory in Barcelona was a dignified ending of the combustion era and the development of the first electric car started in September 2011. Thanks to our sponsors we are now proud to present our eSleek12. The totally new electric drivetrain consists out of 2 synchronous machines with a 2-stage gearbox, very lightweight power electronics and a modular battery consisting of 400 single cells. Our tubular space frame and suspension were further optimized and a significant weight reduction of more than 10 kg could be reached. We are looking forward to an interesting season and wish all teams good luck.
Car Specifications
General
| Frame Construction | optimized tubular steel frame |
|---|---|
| Material | 25CrMo4 |
| Overall Length (mm) | 2925 |
| Overall Width (mm) | 1460 |
| Overall Height (mm) | 1130 |
| Wheelbase (mm) | 1600 |
| Track Front (mm) | 1250 |
| Track Rear (mm) | 1200 |
| Weight Front (kg) | 146 |
| Weight Rear (kg) | 159 |
| Suspension | Double unequal length A-Arm. Push rod actuated spring / damper. Adj. Roll bar |
| Tyres | 20x7.0-13 R25B Hoosier |
| Wheels | 7x13 inch wide, 1 pc Al Rim, 22mm neg. offset |
| Drive Type | two stage gearbox |
| Differential | fully adjustable electronic software differential |
| Cooling | side mounted radiator without fan |
| Brake System | floater mounted 4-Disc system, balance beam for adjustable brake balance |
| Electronics | Self designed current distribution unit, Traction control and Torque vectoring, Model-Driven SW |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear |
| Max Motor Power | 35 kW each |
| Motor Type | AMK |
| Max Motor RPM | 13000 |
| Motor Controller | Custom built by Emerge Engineering |
| Max System Voltage (V) | 420V |
| Electrode Materials | LiPo |
| Accumulator Capacity | 7,4 kWh |
| Transmission Ratio Primary | 1:9,55 |
| Transmission Ratio Secondary | none |
FS past achievements due to World Ranking Data Base
| Date | Event | Teams | Rank | BP | CM | ED | SP | DV SP | AC | DV AC | AX | EN | EF | Pe | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2025.08 | 84 |
9. |
53. |
6. |
14. |
34. |
- |
8. |
16. |
3. |
9. |
17. |
0.00 |
664.75 |
|
| 2025.08 | 37 |
3. |
13. |
4. |
5. |
3. |
- |
3. |
- |
4. |
3. |
2. |
-15.00 |
767.50 |
|
| 2025.07 | 44 |
4. |
10. |
9. |
14. |
9. |
- |
6. |
- |
12. |
3. |
6. |
0.00 |
715.07 |
|
| 2024.08 | 79 |
6. |
22. |
2. |
10. |
9. |
- |
7. |
- |
12. |
3. |
6. |
-10.00 |
669.28 |
|
| 2024.08 | 25 |
6. |
6. |
5. |
3. |
1. |
- |
3. |
- |
1. |
- |
- |
0.00 |
524.70 |
|
| 2024.07 | 31 |
11. |
10. |
4. |
14. |
8. |
- |
2. |
- |
9. |
7. |
- |
0.00 |
358.18 |
|
| 2023.08 | 70 |
3. |
40. |
9. |
30. |
7. |
9. |
7. |
7. |
4. |
3. |
4. |
0.00 |
717.46 |
|
| 2023.07 | 34 |
14. |
25. |
1. |
10. |
9. |
- |
8. |
- |
7. |
- |
- |
0.00 |
424.20 |
|
| 2023.07 | 33 |
4. |
12. |
7. |
14. |
- |
- |
3. |
- |
2. |
- |
- |
-35.00 |
380.09 |
|
| 2022.08 | 63 |
2. |
9. |
29. |
24. |
18. |
- |
4. |
- |
5. |
2. |
3. |
0.00 |
646.78 |
|
| 2022.07 | 30 |
3. |
12. |
3. |
17. |
2. |
- |
2. |
- |
3. |
- |
- |
0.00 |
450.70 |
|
| 2022.07 | 21 |
1. |
5. |
9. |
4. |
2. |
- |
2. |
- |
1. |
1. |
2. |
0.00 |
916.02 |
|
| 2021.08 | 38 |
6. |
13. |
27. |
28. |
- |
- |
4. |
- |
2. |
5. |
13. |
-40.00 |
647.47 |
|
| 2021.08 | 26 |
5. |
11. |
13. |
10. |
2. |
- |
2. |
- |
6. |
5. |
6. |
0.00 |
769.61 |
|
| 2021.07 | 28 |
3. |
6. |
20. |
7. |
- |
- |
- |
- |
2. |
3. |
2. |
-10.00 |
558.96 |
|
| 2019.08 | 39 |
2. |
21. |
6. |
4. |
4. |
- |
2. |
- |
2. |
2. |
11. |
0.00 |
868.10 |
|
| 2019.07 | 21 |
4. |
6. |
5. |
9. |
2. |
- |
1. |
- |
2. |
- |
- |
0.00 |
483.88 |
|
| 2018.08 | 38 |
2. |
25. |
16. |
9. |
1. |
- |
2. |
- |
5. |
2. |
10. |
0.00 |
809.80 |
|
| 2018.08 | 39 |
14. |
25. |
4. |
7. |
3. |
- |
5. |
- |
7. |
- |
- |
0.00 |
461.20 |
|
| 2018.07 | 18 |
4. |
5. |
10. |
2. |
3. |
- |
1. |
- |
3. |
- |
- |
0.00 |
572.85 |
|
| 2017.08 | 30 |
5. |
2. |
6. |
10. |
13. |
- |
2. |
- |
12. |
4. |
4. |
0.00 |
775.00 |
|
| 2017.08 | 34 |
5. |
4. |
4. |
15. |
12. |
- |
1. |
- |
13. |
5. |
2. |
-10.00 |
707.63 |
|
| 2017.07 | 18 |
1. |
5. |
3. |
1. |
2. |
- |
1. |
- |
3. |
1. |
4. |
0.00 |
962.19 |
|
| 2016.08 | 37 |
13. |
2. |
27. |
10. |
10. |
- |
7. |
- |
15. |
- |
- |
0.00 |
388.56 |
|
| 2016.07 | 20 |
3. |
4. |
3. |
2. |
1. |
- |
1. |
- |
1. |
5. |
3. |
-50.00 |
849.33 |
|
| 2015.09 | 20 |
2. |
3. |
9. |
3. |
10. |
- |
2. |
- |
- |
3. |
5. |
0.00 |
742.45 |
|
| 2015.08 | 30 |
11. |
6. |
24. |
12. |
14. |
- |
10. |
- |
14. |
- |
9. |
0.00 |
355.22 |
|
| 2015.08 | 39 |
8. |
10. |
25. |
14. |
- |
- |
20. |
- |
13. |
6. |
2. |
-5.00 |
555.71 |
|
| 2014.08 | 23 |
5. |
12. |
21. |
11. |
6. |
- |
7. |
- |
6. |
4. |
8. |
0.00 |
698.54 |
|
| 2014.08 | 39 |
7. |
19. |
27. |
34. |
11. |
- |
- |
- |
15. |
4. |
4. |
0.00 |
504.71 |
|
| 2013.09 | 24 |
14. |
2. |
7. |
11. |
5. |
- |
11. |
- |
6. |
16. |
- |
0.00 |
449.60 |
|
| 2013.08 | 40 |
14. |
18. |
26. |
12. |
3. |
- |
13. |
- |
6. |
- |
- |
0.00 |
391.30 |
|
| 2012.09 | 17 |
7. |
7. |
6. |
13. |
4. |
- |
8. |
- |
6. |
7. |
4. |
0.00 |
734.26 |
|
| 2012.08 | 32 |
21. |
18. |
26. |
19. |
19. |
- |
16. |
- |
18. |
- |
- |
0.00 |
242.13 |
|
| x 34 | |||||||||||||||