Team Details
High-Voltage Motorsports e.V.
| University | Friedrich-Alexander-Universität Erlangen-Nürnberg
DE Erlangen U short 92 |
 |
|---|---|---|
| Location | Erlangen, Germany | |
| Homepage | https://www.voltages.de/ | |
| Social Media | ||
| CV Team | High-Octane Motorsports e.V. (CV) | |
| DV Team | High-Octane Driverless | |
| Short Link | tid.fsg.one/274 | |
| TIS Status |
     |
|
| Event Details | car 149 - active | |
Team Description
High-Voltage Motorsports e.V. is the Formula Student Team of the Friedrich-Alexander-Universität Erlangen-Nürnberg. Founded in 2007 as High-Octane Motorsports e.V. we have successfully participated in many competitions all over Europe. As a part of the Formula Student Combustion until 2020, we decided to join the Formula Student Electric in 2021. Hoping to be crowned with success, we are looking forward to a great season!
Past Events
2025
Info
75x
test
Car Specifications
General
| Frame Construction | CFRP Monocoque |
|---|---|
| Material | CFRP sandwich structure |
| Overall L | 2930 mm |
| Overall W | 1520 mm |
| Overall H | 1180 mm |
| Wheelbase | 1600 mm |
| Track (Fr) | 1240 mm |
| Track (Rr) | 1150 mm |
| Weight with 68kg driver (Fr) | 115 kg |
| Weight with 68kg driver (Rr) | 125 kg |
| Suspension | Double unequal length A-Arm. Push rod actuated vertikal rocker |
| Tyres (Fr / Rr) | Hoosier, 16 x 7.5 - 10, R25B |
| Wheels (Fr / Rr) | 7.5x10 self-designed CFRP rims |
| Drive Type | helical gearbox |
| Cooling | Two radiator, one on each side in the sidepot |
| Brake System | 4-Disk system, self developed rotors, adjustable brake balance |
| Electronics | Decentralized control system, Self-designed BMS, Self-designed DV compute units |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear Right, Rear Left |
| Max Motor Power (per motor) | 70 kW (35 kW each motor) kW |
| Motor Type | AMK motion 7 DD5-14-10POW |
| Max Motor RPM (highest) | 20000 rpm |
| Motor Controller | KW26-S5-FSE-4Q |
| Max System Voltage | 600V V |
| Electrode Materials | LiNixMnyCozO2 |
| Combined Accumulator Capacity | 7,00 kWh kWh |
| Transmission Ratio (Primary) | 15 : 1 |
| Transmission Ratio (Secondary) | n/a : 1 |
Driverless System
| Processing unit(s) | Intel Core i5-11th Gen, NVidia RTX 3060 |
|---|---|
| Floating Point Operations Per Second of all processing units that are working for the DV system | 12000 GigaFLOPS |
| Power consumption of all processing units that are working for the DV system | 390 W |
| Camera(s) | 2, 30m, 78°, stereo cameras with neural network accelerators |
| Radar sensor(s) | 0 |
| Lidar sensor(s) | 1, 80m, 60°, solid state LiDAR |
| Other sensors | Inertial Navigation System (1) for velocity, acceleration, and GPS with built-in Kalman Filter |
| Highlights of the DV system | Compact powerful computer with NVidia RTX 3060 - ROS2 communication framework - YOLOv5 for cone detection in images - LiDAR cone detection - FastSLAM for mapping and localization - Pathfinder for centerline calculation with interpolation for online racing line - Global racing line calculation for minimum curvature - LQ controller - Pure P |
2024
Info
66x
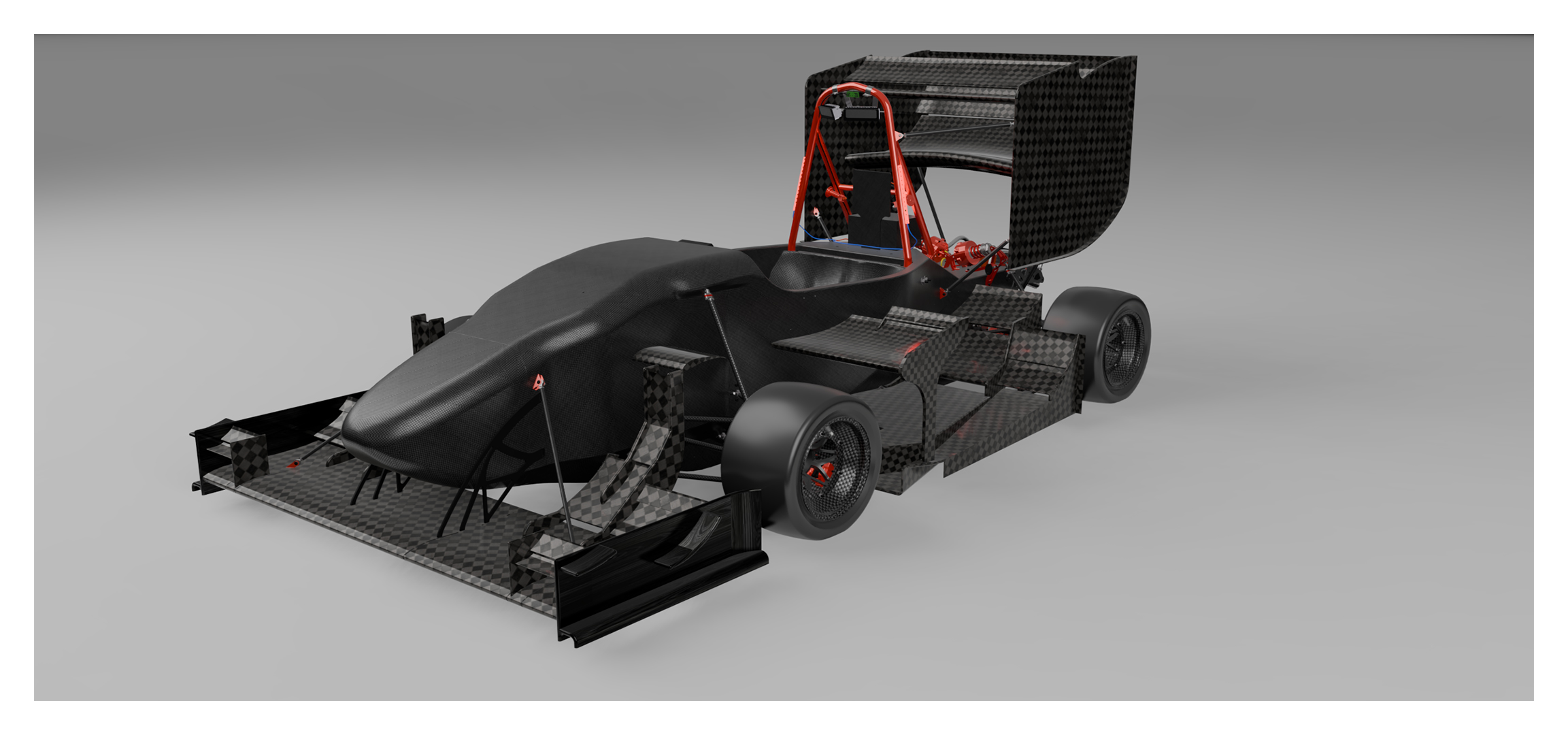
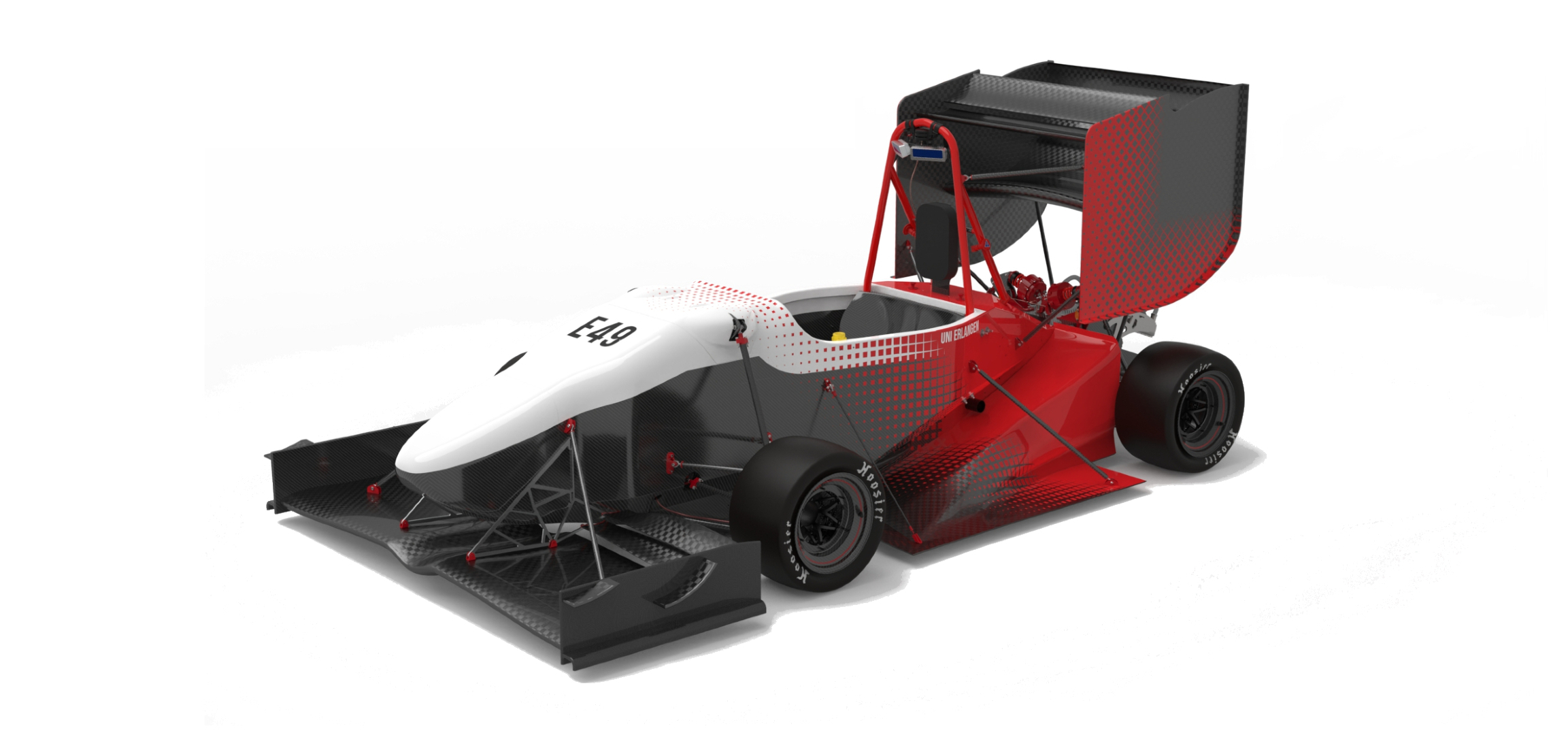
We are High-Voltage Motorsports e.V., the Formula Student Team from the University of Erlangen. 2007 founded under the Name High-Octane Motorsports e.V., we started to build our first racecar and with the complete change to electric cars in 2022 we renamed the club this season. Our car features a RWD powertrain as well as a an active suspension and a lightweight CFRP monocoque. Additionally our vehicle is equiped with a set of stereo cameras as well as a lidar for a good driverless performance.
Engineering Design Priorities:
Lightweight
Testing
Reliability
Aerodynamic
Ergonomics
Vehicle dynamics
Car Specifications
General
| Frame Construction | CFRP Monocoque |
|---|---|
| Material | CFRP sandwich structure |
| Overall L | 2930 mm |
| Overall W | 1520 mm |
| Overall H | 1180 mm |
| Wheelbase | 1600 mm |
| Track (Fr) | 1240 mm |
| Track (Rr) | 1150 mm |
| Weight with 68kg driver (Fr) | 115 kg |
| Weight with 68kg driver (Rr) | 125 kg |
| Suspension | Double unequal length A-Arm. Push rod actuated vertikal rocker |
| Tyres (Fr / Rr) | Hoosier, 16 x 7.5 - 10, R25B |
| Wheels (Fr / Rr) | 7.5x10 self-designed CFRP rims |
| Drive Type | helical gearbox |
| Differential | -- |
| Cooling | One radiator located centrally at the back of the vehicle + fans |
| Brake System | 4-Disk system, self developed rotors, adjustable brake balance |
| Electronics | Decentralized control system, Self-designed BMS, Self-designed DV compute units |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear Right, Rear Left |
| Max Motor Power (per motor) | 70 kW (35 kW each motor) kW |
| Motor Type | AMK motion 7 DD5-14-10POW |
| Max Motor RPM (highest) | 20000 rpm |
| Motor Controller | KW26-S5-FSE-4Q |
| Max System Voltage | 600V V |
| Electrode Materials | LiNixMnyCozO2 |
| Combined Accumulator Capacity | 7,00 kWh kWh |
| Transmission Ratio (Primary) | 15 : 1 |
| Transmission Ratio (Secondary) | n/a : 1 |
Driverless System
| Processing unit(s) | Intel Core i5-11th Gen, NVidia RTX 3060 |
|---|---|
| Floating Point Operations Per Second of all processing units that are working for the DV system | 12000 GigaFLOPS |
| Power consumption of all processing units that are working for the DV system | 390 W |
| Camera(s) | 2, 30m, 78°, stereo cameras with neural network accelerators |
| Radar sensor(s) | 0 |
| Lidar sensor(s) | 1, 80m, 60°, solid state LiDAR |
| Other sensors | Inertial Navigation System (1) for velocity, acceleration, and GPS with built-in Kalman Filter |
| Highlights of the DV system | Compact powerful computer with NVidia RTX 3060 - ROS2 communication framework - YOLOv5 for cone detection in images - LiDAR cone detection - FastSLAM for mapping and localization - Pathfinder for centerline calculation with interpolation for online racing line - Global racing line calculation for minimum curvature - LQ controller - Pure P |
2023
Info
28x
Using our previously gained experience with our first successful EV car, we are excited to show off our second iteration with the FAUmax Pi. At the beginning of this season, we decided to focus on the following fields: maximize our testing time by keeping stuck to the schedule, a lightweight design, reliability, aerodynamic performance, and testing time. We are thrilled to present and power up our car in this year's events.
Engineering Design Priorities:
Testing Time
Lightweight
Reliability
Aerodynamic performance
Car Specifications
General
| Frame Construction | CFRP Monocoque |
|---|---|
| Material | CFRP sandwich structure |
| Overall L | 3042 mm |
| Overall W | 1600 mm |
| Overall H | 1191 mm |
| Wheelbase | 1600 mm |
| Track (Fr) | 1240 mm |
| Track (Rr) | 1150 mm |
| Weight with 68kg driver (Fr) | 115 kg |
| Weight with 68kg driver (Rr) | 125 kg |
| Suspension | Double unequal length A-Arm. Push rod actuated vertikal rocker |
| Tyres (Fr / Rr) | Hoosier, 16 x 7.5 - 10, R25B |
| Wheels (Fr / Rr) | 7.5x10 self-designed CFRP rims |
| Drive Type | helical gearbox |
| Differential | -- |
| Cooling | One radiator located centrally at the back of the vehicle |
| Brake System | 4-Disk system, self developed rotors, adjustable brake balance |
| Electronics | Decentralized control system, Self-designed BMS, Self-designed DV compute units |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear Right and Left |
| Max Motor Power (per motor) | 70kW kW |
| Motor Type | AMK motion 7 DD5-14-10POW |
| Max Motor RPM (highest) | 20000 rpm |
| Motor Controller | KW26-S5-FSE-4Q |
| Max System Voltage | 600 V |
| Electrode Materials | LiNixMnyCozO2 |
| Combined Accumulator Capacity | 6,696 kWh |
| Transmission Ratio (Primary) | 14.98 : 1 |
| Transmission Ratio (Secondary) | n/a : 1 |
Driverless System
| Processing unit(s) | Intel Core i5-11th Gen, NVidia RTX 3060 |
|---|---|
| Floating Point Operations Per Second of all processing units that are working for the DV system | 12000 GigaFLOPS |
| Power consumption of all processing units that are working for the DV system | 390 W |
| Camera(s) | 2, 30m, 78°, stereo cameras with neural network accelerators |
| Radar sensor(s) | 0 |
| Lidar sensor(s) | 1, 80m, 60°, solid state LiDAR |
| Other sensors | Inertial Navigation System (1) for velocity, acceleration, and GPS with built-in Kalman Filter |
| Highlights of the DV system | - Compact powerful computer with NVidia RTX 3060 - ROS2 communication framework - YOLOv5 for cone detection in images - LiDAR cone detection - FastSLAM for mapping and localization - Pathfinder for centerline calculation with interpolation for online racing line - Global racing line calculation for minimum curvature - LQ controller - Pure P |

2022
Info
25x
After creating combustion vehicles since 2007, we are very happy to present our second electric vehicle FAUmax omikron. Our team decided to focus on the following design principles: Efficient and Reliable Powertrain, Lightweight Design, Aerodynamic Efficiency and Integration of DV Components. Let’s see what the electric future brings for High-Octane Motorsports.
Engineering Design Priorities:
Active Suspension
Lightweight
Aerodynamic Efficiency
DV Integration
Car Specifications
General
| Frame Construction | CFRP monocoque |
|---|---|
| Material | CFRP sandwich structure |
| Overall L | 2880 mm |
| Overall W | 1708 mm |
| Overall H | 1193 mm |
| Wheelbase | 1600 mm |
| Track (Fr) | 1240 mm |
| Track (Rr) | 1150 mm |
| Weight with 68kg driver (Fr) | 117 kg |
| Weight with 68kg driver (Rr) | 126 kg |
| Suspension | Double unequal length A-Arm. Push rod actuated vertikal rocker |
| Tyres (Fr / Rr) | Hoosier, 16 x 7.5 - 10, R25B |
| Wheels (Fr / Rr) | 7.5x10 self-designed CFRP rims |
| Drive Type | planetary gearbox |
| Differential | -- |
| Cooling | Two AKG FE2 radiators on both sides of the car |
| Brake System | 4-Disk system, self developed rotors, adjustable brake balance |
| Electronics | Decentralized control systems, Self-designed BMS, Self-designed DV compute units |
Powertrain
| Number of Motors | 2 |
|---|---|
| Motor Location | Rear Right and Left |
| Max Motor Power (per motor) | 70kW kW |
| Motor Type | AMK motion / DD5-14-10POW |
| Max Motor RPM (highest) | 20000 rpm |
| Motor Controller | KW26-S5-FSE-4Q |
| Max System Voltage | 600 V |
| Electrode Materials | LiNixMnyCozO2 |
| Combined Accumulator Capacity | 6,696 kWh |
| Transmission Ratio (Primary) | 15.1 : 1 |
| Transmission Ratio (Secondary) | n/a : 1 |
Driverless System
| Processing unit(s) | 3 Raspberry Pi CM4 modules on custom PCBs, 2 Intel Myriad X VPUs integrated in cameras |
|---|---|
| Floating Point Operations Per Second of all processing units that are working for the DV system | 2800 GigaFLOPS |
| Power consumption of all processing units that are working for the DV system | 25 W |
| Camera(s) | two sets of stereo cameras with 69° FOV and 35m depth-sensing capabilities |
| Radar sensor(s) | / |
| Lidar sensor(s) | one 64-layer LiDAR with 60m range and 104° VFOV |
| Other sensors | / |
| Highlights of the DV system | The DV system of the FAUmax omikron is designed with compactness and power efficiency in mind. NN inference directly takes place on the camera modules. All other algorithms like the LiDAR cone-detector, SLAM, pathfinder and MPC run on three CM4s. Sensor data and CAN-Bus logs are written to a NVMe SSD. |
FS past achievements due to World Ranking Data Base
| Date | Event | Teams | Rank | BP | CM | ED | SP | DV SP | AC | DV AC | AX | EN | EF | Pe | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2025.08 | 84 |
43. |
29. |
23. |
49. |
44. |
- |
36. |
- |
28. |
- |
- |
0.00 |
236.55 |
|
| 2025.08 | 53 |
33. |
11. |
34. |
36. |
34. |
- |
30. |
- |
19. |
- |
- |
-20.00 |
210.90 |
|
| 2025.07 | 44 |
27. |
14. |
21. |
25. |
- |
- |
- |
- |
- |
- |
- |
0.00 |
197.54 |
|
| 2024.08 | 29 |
27. |
27. |
4. |
28. |
21. |
- |
21. |
- |
12. |
- |
- |
0.00 |
201.80 |
|
| 2024.08 | 79 |
44. |
67. |
16. |
34. |
38. |
- |
37. |
- |
39. |
- |
- |
0.00 |
231.91 |
|
| 2024.07 | 38 |
27. |
31. |
12. |
29. |
15. |
- |
15. |
- |
20. |
- |
- |
0.00 |
190.90 |
|
| 2023.08 | 70 |
46. |
54. |
2. |
41. |
- |
- |
- |
- |
- |
- |
- |
-10.00 |
203.52 |
|
| 2023.08 | 35 |
32. |
31. |
11. |
- |
- |
- |
- |
- |
- |
- |
- |
0.00 |
121.00 |
|
| 2022.09 | 38 |
15. |
16. |
15. |
22. |
17. |
- |
13. |
- |
6. |
- |
- |
0.00 |
282.10 |
|
| 2022.08 | 63 |
52. |
61. |
23. |
33. |
- |
- |
- |
- |
- |
- |
- |
-10.00 |
177.33 |
|
| 2022.07 | 26 |
23. |
21. |
16. |
- |
- |
- |
- |
- |
- |
- |
- |
-10.00 |
90.66 |
|
| x 11 | |||||||||||||||