Team Details
As of 2022, this class has been integrated into the other two classes.
Formula Student Team Delft Driverless
| University | TU Delft
NL Delft TU short 41 |
|---|---|
| Location | Delft, Netherlands |
| Homepage | https://www.fsteamdelft.nl/ |
| Social Media | |
| CV Team | Delft University of Technology Racing Team |
| EV Team | Formula Student Team Delft |
| Short Link | tid.fsg.one/974 |
Past Events
2019
Info
83x
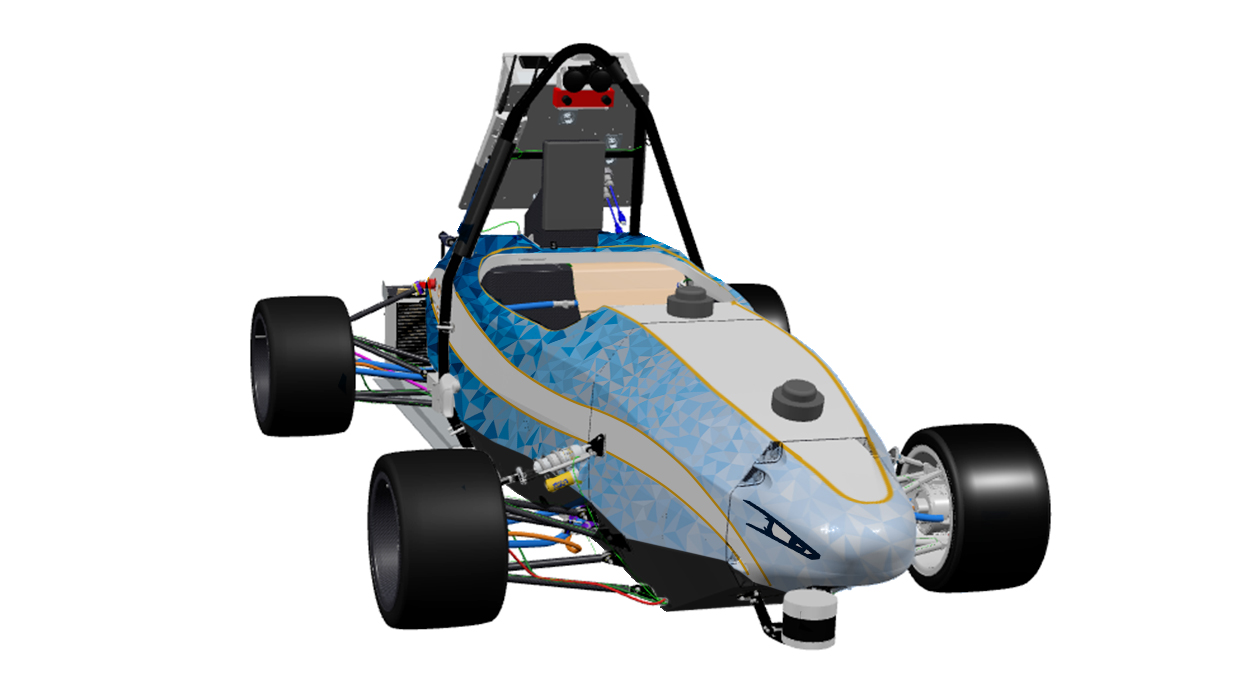
This year our association decided to take its first steps towards the new driverless challenge. The product is us. Delft Driverless in collaboration with MIT Driverless combined forces to make this endeavor a success. Modifying the high performing DUT18 and fixing its power issues, tsuhh, we are happy to present the DUT18D. A car, optimized for real time application at high speeds, our high update rates and low latencies will pave our way to victory! You don't believe it? Visit us on the podium!
Engineering Design Priorities:
Timesync
Multistage testing
Car Specifications
General
| Frame Construction | Full monocoque |
|---|---|
| Material | CFRP with aluminium honeycomb core |
| Overall L | 2831 mm |
| Overall W | 1428 mm |
| Overall H | 1138 mm |
| Wheelbase | 1530 mm |
| Track (Fr) | 1200 mm |
| Track (Rr) | 1200 mm |
| Weight with 68kg driver (Fr) | 88 kg |
| Weight with 68kg driver (Rr) | 92 kg |
| Suspension | Double unequal length A-Arm. Direct acting spring damper front, pushrod rear. |
| Tyres (Fr / Rr) | 225x368-R10, Vredestein |
| Wheels (Fr / Rr) | 214mm CFRP self-made two-piece rim |
| Drive Type | 2 Planet single-stage transmission |
| Differential | Electronic using own control systems |
| Cooling | Water cooled with radiator rearward of chassis |
| Brake System | Rotor floating in hub, 3 & 2 mm steel, 161/119mm, Integrated caliper half |
Powertrain
| Number of Motors | 4 |
|---|---|
| Motor Location | Front Right, Front Left, |
| Max Motor Power (per motor) | 35kW kW |
| Motor Type | AMK DDT5-14-10-POW-14000-B5 |
| Max Motor RPM (highest) | 20000 rpm |
| Motor Controller | AMK KW26-S5-FSE-4Q |
| Max System Voltage | 554V V |
| Electrode Materials | LiCoO2 |
| Combined Accumulator Capacity | 7.3KwH kWh |
| Transmission Ratio (Primary) | 10:10.8 : 1 |
| Transmission Ratio (Secondary) | - |
Driverless System
| Processing unit(s) | Nvidia AGX Xavier, Advantech ARK-3520p |
|---|---|
| Floating Point Operations Per Second of all processing units that are working for the DV system | 11358.616 GigaFLOPS |
| Power consumption of all processing units that are working for the DV system | 130 W |
| Camera(s) | FLIR Grasshopper 3, Nerian Karmin2, FLIR Blackfly S |
| Radar sensor(s) | - |
| Lidar sensor(s) | Velodyne VLP32C |
| Other sensors | ADIS16497, Trimble BX992, Kistler Correvit SFII |
| Highlights of the DV system | 1. Fully redundant perception pipeline, robust against single sensor failure 2. Fully redundant globally consistent positioning using custom- designed Visual-Inertial Odometry (VIO) system and dual-antenna GPS |
FS past achievements due to World Ranking Data Base
| Date | Event | Teams | Rank | BP | CM | ED | DV SP | DV AC | AX | EN | EF | Pe | Total | Engine |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2025.08 | 24 |
8. |
- |
- |
2. |
6. |
- |
- |
- |
- |
0.00 |
277.45 |
||
| 2019.08 | 20 |
3. |
2. |
1. |
3. |
- |
- |
- |
4. |
- |
-25.00 |
460.00 |
||
| 2019.07 | 8 |
2. |
2. |
5. |
1. |
- |
- |
- |
- |
- |
-30.00 |
386.00 |
||
| x 3 | ||||||||||||||